Code Examples: SCARA Arm Modes
The images demonstrate the two different arm modes that the SCARA operates in. The commands to control how the SCARA reacts to different arm configurations are shown below: LEFT: For moves following this command, LEFT arm mode takes priority. RIGH: For moves following...
Code Example: Palletizing with Recovery
The first palletizing example works fine under applications that don't require cycle recovery upon E-stop or power down. The following example uses a "global variable" to maintain the variable count controlling the pallet position increment. Global variables do not...
Code Example: SCARA Palletizing
The SCARA software is shipped without the OFST command available. The following example demonstrates a palletizing operation on the SCARA without using the OFST command. Features of this program: E-stop recovery Code for a two-pallet system (pick from pallet, place on...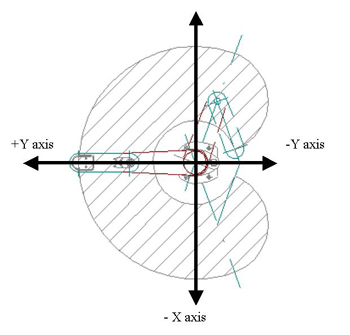
Code Example: IX SCARA Coordinates and Homing
The IX SCARA robot implements the X-SEL controller. The X-SEL controller will make additional commands available, that are exclusive only to the IX SCARA. With the expanded command set also comes three additional tools that are described in the following notes. In...
Teaching Points
All taught positions are based upon a reference point, or "0.00 mm" location. If your actuator / controller combination features absolute encoders, homing is not necessary before teaching points. Incremental encoders will require homing before teaching points. In...
SCARA Work Envelope Example
The picture demonstrates the typical Cartesian coordinate system layout for the SCARA. Based on the position of arm1 and arm2, the SCARA Main CPU converts their radian coordinates to rectangular for the above coordinate system. If an area within the above work...LOGIN AREA / PHONE SUPPORT


