RCP2-GR3SS / GR3SM 3 Finger Electric Slide Gripper

RCP2-GR3SS / GR3SM 3 Finger Electric Slide Gripper
|

RCP2-GR3SS 3 Finger Gripper, Slide Type, Actuator Width 52mm, Pulse Motor
RCP2-GR3SM 3 Finger Gripper, Slide Type, Actuator Width 80mm, Pulse Motor
|
|

|
RCP2-GR3SS Lead and Load Capacity
|
Model
|
Gear Ratio (mm)
|
Max Gripping Force (N)
|
Stroke (mm)
|
| RCP2-GR3SS-I-28P-30-10-P1-[1]-[2] |
30
|
22
|
10
|
[1] = Cable Length, [2] = Options
RCP2-GR3SS Stroke and Maximum Opening/Closing Speed
|
Gear Ratio
|
Stroke
|
10 (mm)
|
|
30
|
10
|
(Unit: mm/s)
RCP2-GR3SS Specs
|
Item
|
Description
|
|
Drive Method
|
Worm Gear + Worm Wheel Gear
|
|
Positioning Repeatability
|
±0.01mm
|
|
Backlash
|
0.3mm or less per side
(Fingers always pressured to open side via spring)
|
|
Weight
|
0.6kg
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
Guide
|
Cross-Roller Guide
|
|
Allowable Load Moment
|
Ma : 3.8Nm Mb : 3.8Nm Mc 3.0Nm
|
|
RCP2-GR3SS Options
| Name |
Model |
Page |
|
Shaft Bracket
|
SB
|
|
|
Flange Bracket
|
FB
|
|
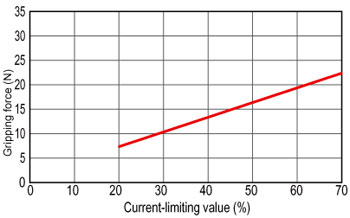
RCP2-GR3SS Correlation Diagram of Speed and Load Capacity
 |
(1) The maximum opening/closing speed indicates the operating speed on one side. The relative operating speed is twice this value.
(2) The maximum gripping force is the sum of gripping forces of both fingers when the gripping point distance is 10 and overhang distance is 0. Refer to the Effective Gripping force formula to determine the work that can be physically transferred. |
|
RCP2-GR3SS Controllers
RCP2 series actuators can be operated using the following controllers.
Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
Positioner Type
|
PCON-C-28PI-NP-2-0
|
Supports up to 512 positioning points
|
512 points
|
DC24V
|
2A max.
|
|
|
Positioner type meeting safety category
|
PCON-CG-28PI-NP-2-0
|
|
Solenoid Valve Type
|
PCON-CY-28PI-NP-2-0
|
Same control actions as those applicable to solenoid valves
|
3 points
|
|
Pulse-train Input Type (differential line driver specification)
|
PCON-PL-28PI-NP-2-0
|
Pulse-train input type supporting a differential line driver
|
(-)
|
|
Pulse-train Input Type (open collector specification)
|
PCON-PO-28PI-NP-2-0
|
Pulse-train input type supporting an open collector
|
|
Serial Communication Type
|
PCON-SE-28PI-0-0
|
Dedicated serial communication type
|
64 points
|
|
Program Control Type
|
PSEL-C-1-28PI-NP-2-0
|
Programmable type capable of operating up to 2 axes
|
1500 points
|
|
RCP2-GR3SM Lead and Load Capacity
|
Model
|
Gear Ratio (mm)
|
Max Gripping Force (N)
|
Stroke (°)
|
| RCP2-GR3SM-I-42P-30-14-P1-[1]-[2] |
30
|
102
|
14
|
[1] = Cable Length, [2] = Options
RCP2-GR3SM Stroke and Maximum Opening/Closing Speed
|
Gear Ratio
|
Stroke
|
14 (mm)
|
|
30
|
50
|
(Unit: mm/s)
RCP2-GR3SM Specs
|
Item
|
Description
|
|
Drive Method
|
Worm Gear + Worm Wheel Gear
|
|
Positioning Repeatability
|
±0.01mm
|
|
Backlash
|
0.3mm or less per side
(Fingers always pressured to open side via spring)
|
|
Weight
|
1.2kg
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
Guide
|
Cross-Roller Guide
|
|
Allowable Load Moment
|
Ma : 6.3Nm Mb : 6.3NM Mc : 5.7Nm
|
|
RCP2-GR3SM Options
| Name |
Model |
Page |
|
Shaft Bracket
|
SB
|
|
|
Flange Bracket
|
FB
|
|
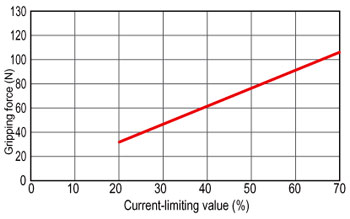
RCP2-GR3SM Correlation Diagram of Speed and Load Capacity
|
(1) The maximum opening/closing speed indicates the operating speed on one side. The relative operating speed is twice this value.
(2) The maximum gripping force is the sum of gripping forces of both fingers when the gripping point distance is 10 and overhang distance is 0. Refer to the Effective Gripping force formula to determine the work that can be physically transferred. |
|
RCP2-GR3SM Controllers
RCP2 series actuators can be operated using the following controllers.
Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
Positioner Type
|
PCON-C-42PI-NP-2-0
|
Supports up to 512 positioning points
|
512 points
|
DC24V
|
2A max.
|
|
|
Positioner type meeting safety category
|
PCON-CG-42PI-NP-2-0
|
|
Solenoid Valve Type
|
PCON-CY-42PI-NP-2-0
|
Same control actions as those applicable to solenoid valves
|
3 points
|
|
Pulse-train Input Type (differential line driver specification)
|
PCON-PL-42PI-NP-2-0
|
Pulse-train input type supporting a differential line driver
|
(-)
|
|
Pulse-train Input Type (open collector specification)
|
PCON-PO-42PI-NP-2-0
|
Pulse-train input type supporting an open collector
|
|
Serial Communication Type
|
PCON-SE-42PI-0-0
|
Dedicated serial communication type
|
64 points
|
|
Program Control Type
|
PSEL-C-1-42PI-NP-2-0
|
Programmable type capable of operating up to 2 axes
|
1500 points
|
|
Please refer to ROBO Cylinder General Catalog
Do you have any questions or comments about our products? Contact Us
Go to:
 |




