|
 RCP2-RA2C Rod Type, Actuator Width 25mm, Pulse Motor, Straight
RCP2-RA3C Rod Type, Actuator Width 25mm, Pulse Motor, Straight
RCP2-RA4C Rod Type, Actuator Width 45mm, Pulse Motor, Straight
RCP2-RA6C Rod Type, Actuator Width 64mm, Pulse Motor, Straight
RCP2-RA2C Rod Type, Actuator Width 25mm, Pulse Motor, Straight
RCP2-RA3C Rod Type, Actuator Width 25mm, Pulse Motor, Straight
RCP2-RA4C Rod Type, Actuator Width 45mm, Pulse Motor, Straight
RCP2-RA6C Rod Type, Actuator Width 64mm, Pulse Motor, Straight
|
|
|
RCP2-RA2C Lead and Load Capacity
|
Model
|
Lead (mm)
|
Maximum load capacity*
|
Max Push Force (N) (#) |
Stroke (mm)
|
| Horizontal (kg) |
Vertical (kg) |
| RCP2-RA2C-I-20P-1-[1]-P1-[2]-[3] |
1
|
7
|
2.5
|
100
|
25~100
|
[1] = Stroke, [2] = Cable Length, [3] = Options
*Take note that the maximum load capacity will decrease as the speed increases.
#Refer to ROBO Cylinder General Catalog
RCP2-RA2C Stroke and Maximum Speed
|
Lead
|
Stroke
|
25-100mm
|
|
1
|
25
|
(Unit: mm/s)
RCP2-RA2C Specs
|
Item
|
Description
|
|
Drive Method
|
Ball Screw Θ6mm, rolled C10
|
|
Positioning Repeatability
|
±0.02mm
|
|
Backlash
|
0.05mm or less
|
|
Rod Diameter
|
Θ12mm
|
|
Rod Non-Rotation Accuracy
|
±2.1°
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
RCP2-RA2C Options
| Name |
Model |
Page |
|
Flange
|
FL
|
|
|
Foot Bracket
|
FT
|
|
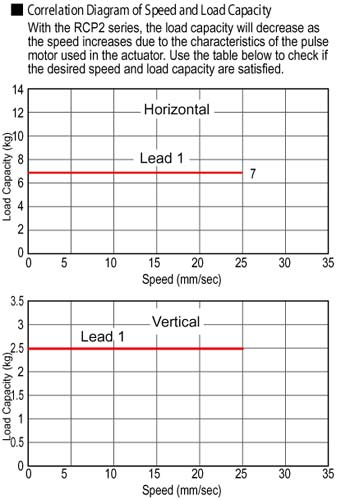
RCP2-RA2C Correlation Diagram of Speed and Load Capacity
 |
(1) The RCP2 series uses a pulse motor, so the load capacity will decrease as the speed increases. Use the correlation diagram of speed and load capacity on the right to check the load capacity corresponding to the speed you desire.
(2) The load capacity is based on operation at an acceleration of 0.05 G. This is the maximum acceleration. The horizontal load capacity assumes use of an external guide. Take note that if the rod receives an external force from any direction other than the moving direction of the rod, the detent may be damaged. |
|
RCP2-RA2C Controllers
RCP2 series actuators can be operated using the following controllers. Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
Positioner Type
|
PCON-C-20PI-NP-2-0
|
Supports up to 512 positioning points
|
512 points
|
DC24V
|
2A max.
|
|
|
Positioner type meeting safety category
|
PCON-CG-20PI-NP-2-0
|
|
Solenoid Valve Type
|
PCON-CY-20PI-NP-2-0
|
Same control actions as those applicable to solenoid valves
|
3 points
|
|
Pulse-train Input Type (differential line driver specification)
|
PCON-PL-20PI-NP-2-0
|
Pulse-train input type supporting a differential line driver
|
(-)
|
|
Pulse-train Input Type (open collector specification)
|
PCON-PO-20PI-NP-2-0
|
Pulse-train input type supporting an open collector
|
|
Serial Communication Type
|
PCON-SE-20PI-0-0
|
Dedicated serial communication type
|
64 points
|
|
Program Control Type
|
PSEL-C-1-20PI-NP-2-0
|
Programmable type capable of operating up to 2 axes
|
1500 points
|
|
RCP2-RA3C Lead and Load Capacity
|
Model
|
Lead (mm)
|
Maximum load capacity*
|
Max Push Force (N) (#) |
Stroke (mm)
|
| Horizontal (kg) |
Vertical (kg) |
| RCP2-RA3C-I-28P-5-[1]-P1-[2]-[3] |
5
|
~15
|
~6
|
|
50-200
|
| RCP2-RA3C-I-28P-2.5-[1]-P1-[2]-[3] |
2.5
|
~30
|
~10
|
[1] = Stroke, [2] = Cable Length, [3] = Options
*Take note that the maximum load capacity will decrease as the speed increases.
RCP2-RA3C Stroke and Maximum Speed
|
Lead
|
Stroke
|
50-200mm
|
|
1
|
187
|
|
2.5
|
114
|
(Unit: mm/s)
RCP2-RA3C Specs
|
Item
|
Description
|
|
Drive Method
|
Ball Screw Θ8mm, rolled C10
|
|
Positioning Repeatability
|
±0.02mm
|
|
Backlash
|
0.05mm or less
|
|
Rod Diameter
|
Θ22mm
|
|
Rod Non-Rotation Accuracy
|
±1.5°
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
RCP2-RA3C Options
| Name |
Model |
Page |
|
Flange
|
FL
|
|
|
Foot Bracket
|
FT
|
|
Reversed-Home Specification
|
NM
|
|
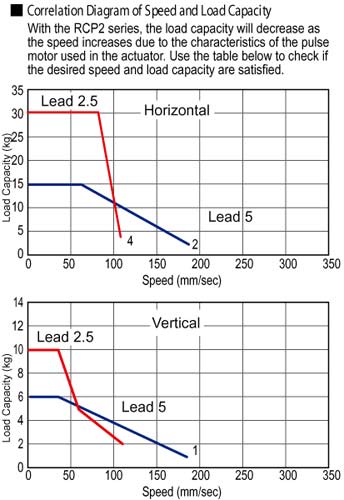
RCP2-RA3C Correlation Diagram of Speed and Load Capacity
|
(1) The RCP2 series uses a pulse motor, so the load capacity will decrease as the speed increases. Use the correlation diagram of speed and load capacity on the right to check the load capacity corresponding to the speed you desire.
(2) The load capacity is based on operation at an acceleration of 0.2 G. This is the maximum acceleration. The horizontal load capacity assumes use of an external guide. Take note that if the rod receives an external force from any direction other than the moving direction of the rod, the detent may be damaged. |
|
RCP2-RA3C Controllers
RCP2 series actuators can be operated using the following controllers. Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
Positioner Type
|
PCON-C-28PI-NP-2-0
|
Supports up to 512 positioning points
|
512 points
|
DC24V
|
2A max.
|
|
|
Positioner type meeting safety category
|
PCON-CG-28PI-NP-2-0
|
|
Solenoid Valve Type
|
PCON-CY-28PI-NP-2-0
|
Same control actions as those applicable to solenoid valves
|
3 points
|
|
Pulse-train Input Type (differential line driver specification)
|
PCON-PL-28PI-NP-2-0
|
Pulse-train input type supporting a differential line driver
|
(-)
|
|
Pulse-train Input Type (open collector specification)
|
PCON-PO-28PI-NP-2-0
|
Pulse-train input type supporting an open collector
|
|
Serial Communication Type
|
PCON-SE-28PI-0-0
|
Dedicated serial communication type
|
64 points
|
|
Program Control Type
|
PSEL-C-1-28PI-NP-2-0
|
Programmable type capable of operating up to 2 axes
|
1500 points
|
|
RCP2-RA4C Lead and Load Capacity
|
Model
|
Lead (mm)
|
Maximum load capacity*
|
Max Push Force (N) (#) |
Stroke (mm)
|
| Horizontal (kg) |
Vertical (kg) |
| RCP2-RA4C-I-42P-10-[1]-P1-[2]-[3] |
10
|
~25
|
~4.5
|
150
|
50-300
|
| RCP2-RA4C-I-42P-5-[1]-P1-[2]-[3] |
5
|
~40
|
~12
|
284
|
| RCP2-RA4C-I-42P-2.5-[1]-P1-[2]-[3] |
2.5
|
40
|
~19
|
358
|
[1] = Stroke, [2] = Cable Length, [3] = Options
*Take note that the maximum load capacity will decrease as the speed increases.
#Refer to ROBO Cylinder General Catalog
RCP2-RA4C Stroke and Maximum Speed
|
Lead
|
Stroke
|
50-200mm |
250mm |
300mm
|
|
10
|
458
|
458
|
350
|
|
5
|
250
|
237
|
175
|
|
2.5
|
125<114>
|
118<114>
|
87
|
*The figures in <> apply when the actuator is used vertically. (Unit: mm/s)
RCP2-RA4C Specs
|
Item
|
Description
|
|
Drive Method
|
Ball screw Θ8mm, rolled C10
|
|
Positioning Repeatability
|
±0.02mm
|
|
Backlash
|
0.05mm or less
|
|
Rod Diameter
|
Θ22mm
|
|
Rod Non-Rotation Accuracy
|
±1.5°
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
RCP2-RA4C Options
| Name |
Model |
Page |
|
Reversed-home Specification
|
NM
|
|
|
Flange
|
FL
|
|
Brake
|
B
|
|
Foot Bracket
|
FT
|
|
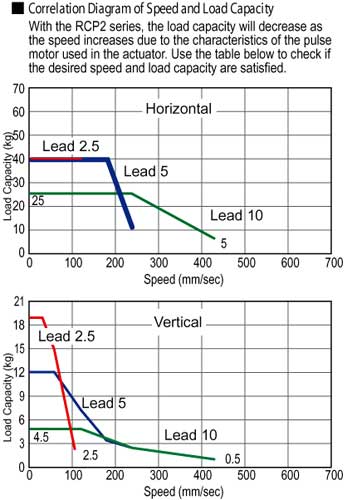
RCP2-RA4C Correlation Diagram of Speed and Load Capacity
|
(1) The RCP2 series uses a pulse motor, so the load capacity will decrease as the speed increases. Use the correlation diagram of speed and load capacity on the right to check the load capacity corresponding to the speed you desire.
(2) The load capacity is based on operation at an acceleration of 0.2 G. This is the maximum acceleration. The horizontal load capacity assumes use of an external guide. Take note that if the rod receives an external force from any direction other than the moving direction of the rod, the detent may be damaged. |
|
RCP2-RA4C Controllers
RCP2 series actuators can be operated using the following controllers. Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
Positioner Type
|
PCON-C-42PI-NP-2-0
|
Supports up to 512 positioning points
|
512 points
|
DC24V
|
2A max.
|
|
|
Positioner type meeting safety category
|
PCON-CG-42PI-NP-2-0
|
|
Solenoid Valve Type
|
PCON-CY-42PI-NP-2-0
|
Same control actions as those applicable to solenoid valves
|
3 points
|
|
Pulse-train Input Type (differential line driver specification)
|
PCON-PL-42PI-NP-2-0
|
Pulse-train input type supporting a differential line driver
|
(-)
|
|
Pulse-train Input Type (open collector specification)
|
PCON-PO-42PI-NP-2-0
|
Pulse-train input type supporting an open collector
|
|
Serial Communication Type
|
PCON-SE-42PI-0-0
|
Dedicated serial communication type
|
64 points
|
|
Program Control Type
|
PSEL-C-1-42PI-NP-2-0
|
Programmable type capable of operating up to 2 axes
|
1500 points
|
|
RCP2-RA6C Lead and Load Capacity
|
Model
|
Lead (mm)
|
Maximum load capacity*
|
Max Push Force (N) (#) |
Stroke (mm)
|
| Horizontal (kg) |
Vertical (kg) |
| RCP2-RA6C-I-56P-16-[1]-P1-[2]-[3] |
16
|
~40
|
~5
|
240
|
50-300
|
| RCP2-RA6C-I-56P-8-[1]-P1-[2]-[3] |
8
|
~50
|
~17.5
|
470
|
| RCP2-RA6C-I-56P-4-[1]-P1-[2]-[3] |
4
|
~55
|
~26
|
800
|
[1] = Stroke, [2] = Cable Length, [3] = Options
*Take note that the maximum load capacity will decrease as the speed increases.
#Refer to ROBO Cylinder General Catalog
RCP2-RA6C Stroke and Maximum Speed
|
Lead
|
Stroke
|
50-300mm |
|
16
|
450<400>
|
|
8
|
210
|
|
4
|
130
|
*The figures in <> apply when the actuator is used vertically. (Unit: mm/s)
RCP2-RA6C Specs
|
Item
|
Description
|
|
Drive Method
|
Ball screw Θ12mm, rolled C10
|
|
Positioning Repeatability
|
±0.02mm
|
|
Backlash
|
0.05mm or less
|
|
Rod Diameter
|
Θ30mm
|
|
Rod Non-Rotation Accuracy
|
±1.0°
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
RCP2-RA6C Options
| Name |
Model |
Page |
|
Reversed-home Specification
|
NM
|
|
|
Flange
|
FL
|
|
Brake
|
B
|
|
Foot Bracket
|
FT
|
|
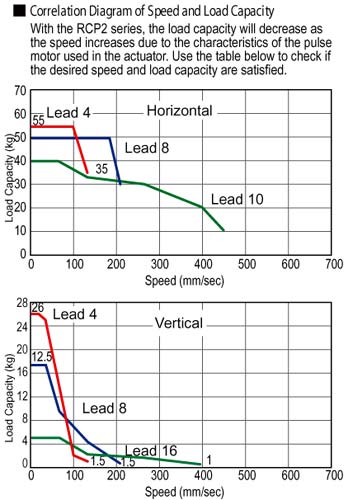
RCP2-RA6C Correlation Diagram of Speed and Load Capacity
|
(1) The RCP2 series uses a pulse motor, so the load capacity will decrease as the speed increases. Use the correlation diagram of speed and load capacity on the right to check the load capacity corresponding to the speed you desire.
(2) The load capacity is based on operation at an acceleration of 0.2 G. This is the maximum acceleration. The horizontal load capacity assumes use of an external guide. Take note that if the rod receives an external force from any direction other than the moving direction of the rod, the detent may be damaged. |
|
RCP2-RA6C Controllers
RCP2 series actuators can be operated using the following controllers. Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
Positioner Type
|
PCON-C-56PI-NP-2-0
|
Supports up to 512 positioning points
|
512 points
|
DC24V
|
2A max.
|
|
|
Positioner type meeting safety category
|
PCON-CG-56PI-NP-2-0
|
|
Solenoid Valve Type
|
PCON-CY-56PI-NP-2-0
|
Same control actions as those applicable to solenoid valves
|
3 points
|
|
Pulse-train Input Type (differential line driver specification)
|
PCON-PL-56PI-NP-2-0
|
Pulse-train input type supporting a differential line driver
|
(-)
|
|
Pulse-train Input Type (open collector specification)
|
PCON-PO-56PI-NP-2-0
|
Pulse-train input type supporting an open collector
|
|
Serial Communication Type
|
PCON-SE-56PI-0-0
|
Dedicated serial communication type
|
64 points
|
|
Program Control Type
|
PSEL-C-1-56PI-NP-2-0
|
Programmable type capable of operating up to 2 axes
|
1500 points
|
|
Please refer to ROBO Cylinder General Catalog
Do you have any questions or comments about our products? Contact Us
Go to:
 |



