|
|

ERC2-RGS6C Controller-Integrated Type,
Rod Type with Single Guide, Actuator Width 58mm, Pulse Motor, Straight
ERC2-RGS7C Controller-Integrated Type,
Rod Type with Single Guide Actuator Width 68mm, Pulse Motor, Straight
|
|
|
|
ERC2-RGS6C Lead and Load Capacity
|
Model
|
Lead (mm)
|
Maximum load capacity*
|
Max Push Force (N) (#) |
Stroke (mm)
|
| Horizontal (kg) |
Vertical (kg) |
| ERC2-RGS6C-I-PM-12-[1]-[2]-[3]-[4] |
12
|
~25
|
~4.5
|
78
|
50-300
|
| ERC2-RGS6C-I-PM-6-[1]-[2]-[3]-[4] |
6
|
40
|
~12
|
157
|
| ERC2-RGS6C-I-PM-3-[1]-[2]-[3]-[4] |
3
|
40
|
~18
|
304
|
[1] = Stroke, [2] = I/O Type, [3] = Cable Length, [4] = Options
*Take note that the maximum load capacity will decrease as the speed increases.
#Refer to ERC2-RGS6C pdf
ERC2-RGS6C Stroke and Maximum Speed
|
Lead
|
Stroke
|
50-600 mm
|
600 mm
|
|
12
|
600
|
500
|
|
6
|
300
|
255
|
|
3
|
150
|
125
|
(Unit: mm/s)
ERC2-RGS6C Specs
|
Item
|
Description
|
|
Drive Method
|
Ball screw Θ10mm, rolled C10
|
|
Positioning Repeatability
|
±0.05mm
|
|
Backlash
|
0.1mm or less
|
|
Rod Diameter
|
Θ22mm, dedicated SUS pipe
|
|
Rod Non-Rotation Accuracy
|
±1.5°
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|

|
|
ERC2-RGS6C Options
| Name |
Model |
Page |
|
Brake
|
B
|
|
|
Reversed-home specification
|
NM
|
|
Foot Bracket
|
FT
|
|
|
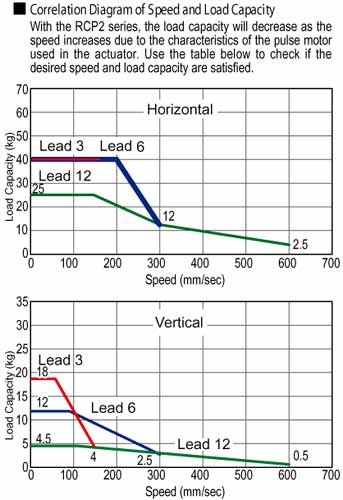
ERC2-RGS6C Correlation Diagram of Speed and Load Capacity
 |
(1) When the stroke increases, the maximum speed will drop to prevent the ball screw from reaching a critical speed. Use the actuator specification table above to check the maximum speed at the stroke you desire.
(2) The ERC2 series uses a pulse motor, so the load capacity will decrease as the speed increases. Use the correlation diagram of speed and load capacity on the right to check the load capacity corresponding to the speed you desire.
(3) The load capacity is based on operation at an acceleration of 0.3G (or 0.2G if the lead is 3 or the actuator is operated vertically). This is the maximum acceleration.
(4) The horizontal load capacity assumes use of an external guide. |
|
|
ERC2-RGS6C I/O Type (Actuator with Built-In Controller)
You can select a desired built-in controller of the ERC2 series from among the following three types, each adopting different external input/output (I/O) specifications. Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
PIO type (NPN specification)
|
ERC2-RGS6C-I-PM-[]-[]-NP-[]-[]
|
Simple control type capable of positioning to a max of 16 points
|
16
|
DC24V
|
2A max.
|
|
|
PIO type (PNP specification)
|
ERC2-RGS6C-I-PM-[]-[]-PN-[]-[]
|
PNP I/O type popular overseas
|
16
|
|
SIO type
|
ERC2-RGS6C-I-PM-[]-[]-SE-[]-[]
|
Dedicated field network connection type (using a gateway unit)
|
64
|
|
|
ERC2-RGS7C Lead and Load Capacity
|
Model
|
Lead (mm)
|
Maximum load capacity*
|
Max Push force (N) (#)
|
Stroke (mm)
|
| Horizontal (kg) |
Vertical (kg) |
| ERC2-RGS7C-I-PM-16-[1]-[2]-[3]-[4] |
16
|
~40
|
~5
|
220
|
50-300
|
| ERC2-RGS7C-I-PM-8-[1]-[2]-[3]-[4] |
8
|
~50
|
~17.5
|
441
|
| ERC2-RGS7C-I-PM-4-[1]-[2]-[3]-[4] |
4
|
~55
|
~25
|
873
|
[1] = Stroke, [2] = I/O Type, [3] = Cable Length, [4] = Options
*Take note that the maximum load capacity will decrease as the speed increases.
#Refer to ERC2-RGS7C pdf
ERC2-RGS7C Stroke and Maximum Speed
|
Lead
|
Stroke
|
50-600 mm
|
|
16
|
450 <400>
|
|
8
|
250 <200>
|
|
4
|
125
|
<> applies when the actuator is used vertically. (Unit: mm/s)
ERC2-RGS7C Specs
|
Item
|
Description
|
|
Drive Method
|
Ball screw Θ12mm, rolled C10
|
|
Positioning Repeatability
|
±0.05mm
|
|
Backlash
|
0.1mm or less
|
|
Rod Diameter
|
Θ30 mm, Dedicated SUS Pipe
|
|
Rod Non-Rotation Accuracy
|
±1.5°
|
|
Ambient Operating Temp/Humidity
|
0-40 °C, 85% RH or below (non-condensing)
|
|
|
ERC2-RGS7C Options
| Name |
Model |
Page |
|
Brake
|
B
|
|
|
Reversed-home specification
|
NM
|
|
Foot Bracket
|
FT
|
|
|
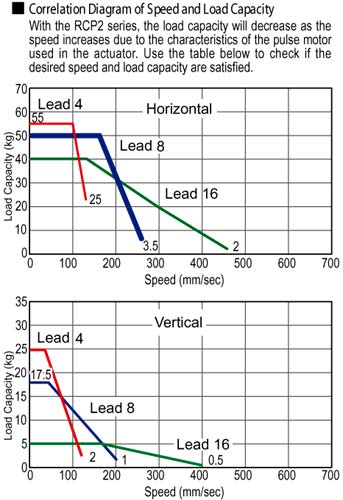
ERC2-RGS7C Correlation Diagram of Speed and Load Capacity
|
(1) When the stroke increases, the maximum speed will drop to prevent the ball screw from reaching a critical speed. Use the actuator specification table above to check the maximum speed at the stroke you desire.
(2) The ERC2 series uses a pulse motor, so the load capacity will decrease as the speed increases. Use the correlation diagram of speed and load capacity on the right to check the load capacity corresponding to the speed you desire.
(3) The load capacity is based on operation at an acceleration of 0.3G (or 0.2G if the lead is 4 or the actuator is operated vertically). This is the maximum acceleration.
(4) The horizontal load capacity assumes use of an external guide. |
|
|
ERC2-RGS7C I/O Type (Actuator with Built-In Controller)
You can select a desired built-in controller of the ERC2 series from among the following three types, each adopting different external input/output (I/O) specifications. Choose the type that best suits your specific purpose.
|
Name
|
Model
|
Features
|
Max Positioning Points
|
Input Power Supply
|
Power Supply Capacity
|
Reference
|
|
PIO type (NPN specification)
|
ERC2-RGS7C-I-PM-[]-[]-NP-[]-[]
|
Simple control type capable of positioning to a max of 16 points
|
16
|
DC24V
|
2A max.
|
|
|
PIO type (PNP specification)
|
ERC2-RGS7C-I-PM-[]-[]-PN-[]-[]
|
PNP I/O type popular overseas
|
16
|
|
SIO type
|
ERC2-RGS7C-I-PM-[]-[]-SE-[]-[]
|
Dedicated field network connection type (using a gateway unit)
|
64
|
|
|
Please refer to ROBO Cylinder General Catalog
Do you have any questions or comments about our products? Contact Us
Go to:
 |





