RCP6-HSA6C











*Note: Some pictures on this page are still Japanese version and the English version pictures are coming soon.
Main Specifications
| item | Contents | |||||
|---|---|---|---|---|---|---|
| Lead | Ball screw lead (mm) | 20 | 12 | 6 | 3 | |
| Horizontal | Payload capacity | Maximum payload (kg) (high output effective) | 15 | 29 | 50 | 42 |
| Maximum payload (kg) (high output disabled) | 8 | 14 | 20 | 25 | ||
| Speed/Acceleration | Maximum speed (mm/s) | 1280 | 900 | 450 | 225 | |
| Minimum speed (mm/s) | 25 | 15 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.1 | 0.1 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 1 | 1 | 1 | 1 | ||
| vertical | Payload capacity | Maximum payload (kg) (high output effective) | 1 | 2.5 | 6 | 16 |
| Maximum payload (kg) (high output disabled) | 0.75 | 2 | 5 | 10 | ||
| Speed/Acceleration | Maximum speed (mm/s) | 1120 | 900 | 450 | 225 | |
| Minimum speed (mm/s) | 25 | 15 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 0.5 | 0.5 | 0.5 | 0.5 | ||
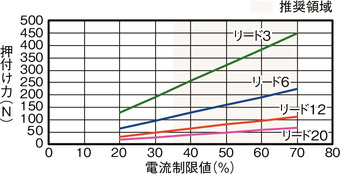
| Pressing | Maximum thrust when pressing (N) | 67 | 112 | 224 | 449 | |
| Maximum pressing speed (mm/s) | 20 | 20 | 20 | 20 | ||
| brake | Brake Specifications | Non-excitation electromagnetic brake | ||||
| Brake holding force (kgf) | 1 | 2.5 | 6 | 16 | ||
| stroke | Minimum stroke (mm) | 50 | 50 | 50 | 50 | |
| Maximum stroke (mm) | 800 | 800 | 800 | 800 | ||
| Stroke pitch (mm) | 50 | 50 | 50 | 50 | ||
| item | Contents |
|---|---|
| Drive system | Ball screw φ10mm rolled C10 |
| Repeated positioning accuracy (Note 3) | ±0.01mm 【±0.005mm】 |
| Lost Motion | Less than 0.1 mm |
| base | Material: Aluminum, white anodized |
| Linear guide | Direct-acting infinite circulation type |
| Static allowable moment | Ma: 65 N・m |
| Mb: 75 N・m | |
| Mc: 120 N・m | |
| Dynamic allowable moment (Note 4) |
Ma: 33.7 N・m |
| Mb: 40.2 N・m | |
| Mc: 55.3 N・m | |
| Ambient temperature and humidity | 0 to 40°C, 85% RH or less (no condensation) |
| Protection rating | IP20 |
| Vibration and shock resistance | 4.9m/ s2 |
| Overseas compatible standards | CE mark, RoHS directive |
| Motor Type | Pulse motor |
| Encoder Type | Battery-less absolute |
| Encoder Pulse Number | 8192 pulses/rev |
| deadline | Listed on the website [Delivery Date Inquiry] |
(Note 3) Values in brackets [ ] are for high precision specifications (leads 3, 6, 12).
(Note 4) Based on a standard rated life of 5,000 km. The running life will vary depending on the operating conditions and installation. Please check the running life on page
Slider type moment direction

(Unit: mm/s)
| Lead (mm) |
Connection Controller |
50 to 400 (in 50mm increments) |
450 (mm) |
500 (mm) |
550 (mm) |
600 (mm) |
650 (mm) |
700 (mm) |
750 (mm) |
800 (mm) |
|---|---|---|---|---|---|---|---|---|---|---|
| 20 | High output enabled | 1280 <1120> | 1090 | 940 | 815 | 715 | 630 | 560 | ||
| High output disabled | 800 | 715 | 630 | 560 | ||||||
| 12 | High output enabled | 900 | 845 | 705 | 585 | 515 | 445 | 390 | 345 | 315 |
| High output disabled | 680<560> | 585<560> | 515 | 445 | 390 | 345 | 315 | |||
| 6 | High output enabled | 450 | 415 | 350 | 295 | 255 | 220 | 190 | 170 | 140 |
| High output disabled | 340 | 295 | 255 | 220 | 190 | 170 | 140 | |||
| 3 | High output enabled | 225 | 205 | 170 | 145 | 125 | 110 | 95 | 85 | 70 |
| High output disabled | 170 | 145 | 125 | 110 | 95 | 85 | 70 | |||
(Note) Values in < > are for vertical use.
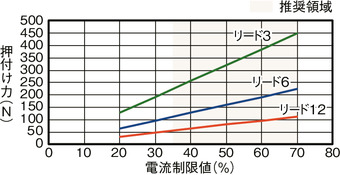
Correlation diagram between pressing force and current limit value
Payload capacity by speed and acceleration *High output setting is enabled at the time of shipment. For details, see page 1-23 .
High output setting enabled (power mode) The maximum speed varies depending on the payload. The payload is in kg. Blank spaces indicate that the operation is not possible.
| posture | Horizontal | vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 15 | 15 | 10 | 8 | 7 | 1 | 1 | 1 |
| 160 | 15 | 15 | 10 | 8 | 7 | 1 | 1 | 1 |
| 320 | 15 | 12 | 10 | 8 | 6 | 1 | 1 | 1 |
| 480 | 12 | 12 | 9 | 8 | 6 | 1 | 1 | 1 |
| 640 | 12 | 12 | 8 | 6 | 5 | 1 | 1 | 1 |
| 800 | 10 | 10 | 6.5 | 4.5 | 3 | 1 | 1 | 1 |
| 960 | 8 | 5 | 3.5 | 1.5 | 1 | 1 | ||
| 1120 | 5 | 3 | 2 | 1 | 0.5 | 0.5 | ||
| 1280 | 1 | 0.5 | ||||||
| posture | Horizontal | vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 29 | 27 | 20 | 17 | 14 | 2.5 | 2.5 | 2.5 |
| 80 | 29 | 27 | 20 | 17 | 14 | 2.5 | 2.5 | 2.5 |
| 200 | 29 | 27 | 20 | 17 | 14 | 2.5 | 2.5 | 2.5 |
| 320 | 29 | 27 | 20 | 14 | 12 | 2.5 | 2.5 | 2.5 |
| 440 | 29 | 26 | 18 | 12 | 10 | 2.5 | 2.5 | 2.5 |
| 560 | 29 | 20 | 12 | 8 | 7 | 2.5 | 2.5 | 2.5 |
| 700 | 14 | 8 | 5 | 4 | 2 | 1 | ||
| 800 | 9 | 4 | 2 | 1 | 1.5 | 1 | ||
| 900 | 5 | 2 | 1 | 0.5 | 0.5 | |||
| posture | Horizontal | vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 50 | 45 | 40 | 35 | 30 | 6 | 6 | 6 |
| 40 | 50 | 45 | 40 | 35 | 30 | 6 | 6 | 6 |
| 100 | 50 | 45 | 40 | 35 | 30 | 6 | 6 | 6 |
| 160 | 50 | 43 | 35 | 32 | 20 | 6 | 6 | 6 |
| 220 | 48 | 39 | 29 | 24 | 20 | 6 | 6 | 6 |
| 280 | 44 | 35 | 26 | twenty one | 15 | 6 | 6 | 5.5 |
| 340 | 38 | 31 | 19 | 14 | 11 | 6 | 5 | 4.5 |
| 400 | 32 | 18 | 10 | 6 | 4 | 4.5 | 3 | 2.5 |
| 450 | 26 | 11 | 4 | 2 | 1 | 3.5 | 1.5 | 1 |
| posture | Horizontal | vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 42 | 42 | 37 | 35 | 35 | 16 | 16 | 16 |
| 50 | 42 | 42 | 37 | 35 | 35 | 16 | 16 | 16 |
| 80 | 40 | 40 | 35 | 35 | 30 | 16 | 16 | 16 |
| 110 | 40 | 40 | 35 | 35 | 30 | 16 | 16 | 16 |
| 140 | 40 | 40 | 35 | 35 | 28 | 16 | 15 | 15 |
| 170 | 40 | 40 | 32 | 26 | 26 | 14 | 11 | 11 |
| 200 | 40 | 30 | twenty one | 10 | 10 | 9 | 5 | 5 |
| 225 | 40 | 8 | 6 | 2 | ||||
High output setting disabled (energy saving mode) The maximum speed varies depending on the payload. The payload is in kg. Blank spaces indicate that the operation is not possible.
| posture | Horizontal | vertical | |
|---|---|---|---|
| speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 8 | 5 | 0.75 |
| 160 | 8 | 5 | 0.75 |
| 320 | 8 | 5 | 0.75 |
| 480 | 8 | 4 | 0.75 |
| 640 | 6 | 3 | 0.75 |
| 800 | 4 | 1.5 | 0.5 |
| posture | Horizontal | vertical | |
|---|---|---|---|
| speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 14 | 10 | 2 |
| 80 | 14 | 10 | 2 |
| 200 | 14 | 10 | 2 |
| 320 | 14 | 10 | 2 |
| 440 | 11 | 7 | 1.5 |
| 560 | 7 | 2.5 | 1 |
| 680 | 4 | ||
| posture | Horizontal | vertical | |
|---|---|---|---|
| speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 20 | 14 | 5 |
| 40 | 20 | 14 | 5 |
| 100 | 20 | 14 | 5 |
| 160 | 20 | 14 | 5 |
| 220 | 16 | 14 | 4 |
| 280 | 13 | 7 | 2.5 |
| 340 | 8 | 1 | 1 |
| posture | Horizontal | vertical | |
|---|---|---|---|
| speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 25 | 22 | 10 |
| 20 | 25 | 22 | 10 |
| 50 | 25 | 22 | 10 |
| 80 | 25 | 22 | 10 |
| 110 | 20 | 14 | 8 |
| 140 | 15 | 11 | 5 |
| 170 | 5 | 1.5 | |
Adaptive Controller
The actuators on this page can be operated with the following controllers. Please select the type that suits your application.
| name | exterior | Maximum number of connectable axes |
Power supply voltage | Control Method | Maximum number of positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | program | Network ※Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
 |
4 | Single phase AC 100-230V |
- | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 | |
 |
1 | DC24V | ● ※Select |
● ※Select |
- | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (network specification is 768) |
|
 |
1 | ● ※Select |
● ※Select |
- | - | - | - | - | - | - | - | - | - | - | - | - | 64 | ||
 |
16 (ML3, SSN, ECM are 8) |
- | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3, SSN, ECM no position data) |
||
 |
8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | ||
(Note) For network abbreviations such as DV and CC, please see page
International Standards


Selection considerations
| (1) As the stroke becomes longer, the maximum speed decreases due to the critical speed of the ball screw. Check the maximum speed for the desired stroke in "Stroke and maximum speed". (2) The maximum load capacity is shown in "Main specifications". For details, refer to "Load capacity by speed and acceleration table". (3) When performing a pressing operation, refer to "Correlation diagram of pressing force and current limit value". The pressing force is a guideline value. For points of caution, refer to page . (4) The duty ratio must be limited depending on the ambient temperature during use. For details, refer to page . (5) Caution is required depending on the mounting position. For details, refer to page . (6) The guideline for the overhang load length is 300 mm or less in the Ma, Mb, and Mc directions (600 mm or less for double slider specifications). For details on the overhang load length, refer to the explanation on page . (7) For the order type and precautions for double slider specifications, refer to page |
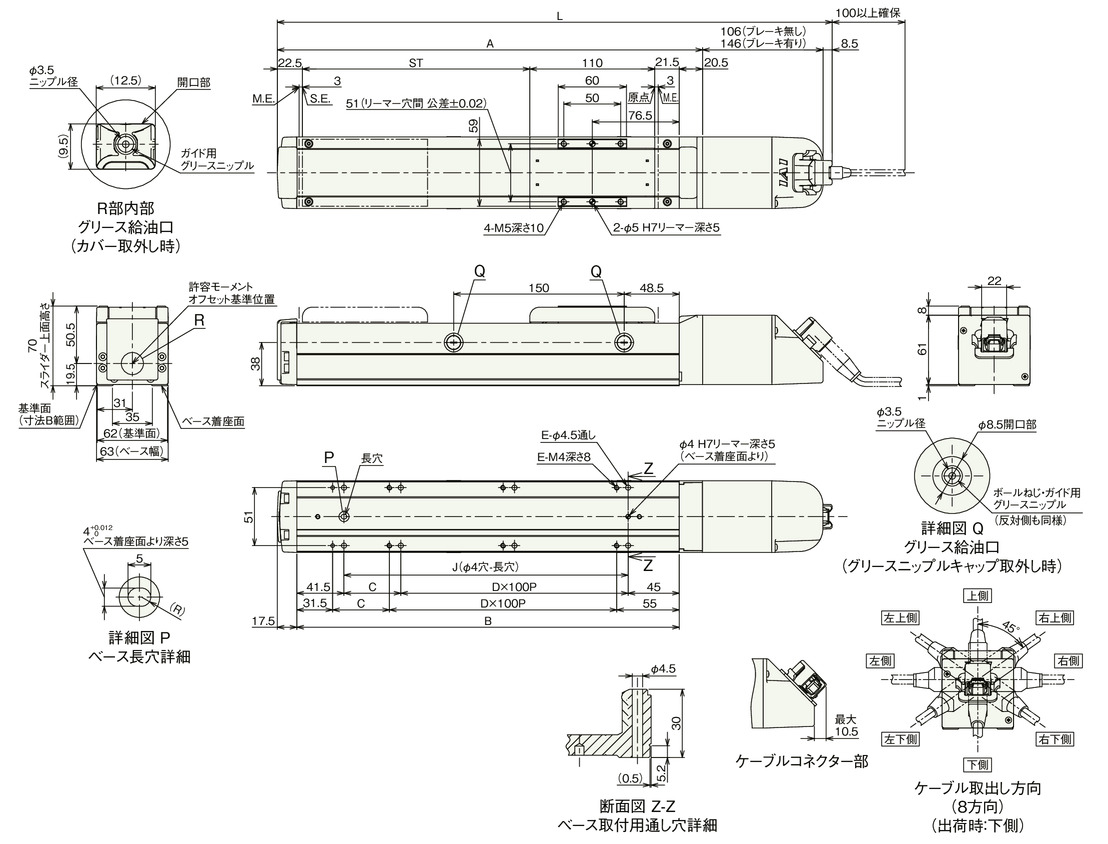
Dimensions
ST: Stroke
ME: Mechanical end
SE: Stroke end
(Note) When performing origin return, the slider will move to the ME, so please be careful not to interfere with the surroundings.
(Note) For details on precautions for changing the cable exit direction, refer to page
Stroke dimensions
| stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | No brakes | 339 | 389 | 439 | 489 | 539 | 589 | 639 | 689 | 739 | 789 | 839 | 889 | 939 | 989 | 1039 | 1089 |
| With brake | 379 | 429 | 479 | 529 | 579 | 629 | 679 | 729 | 779 | 829 | 879 | 929 | 979 | 1029 | 1079 | 1129 | |
| A | 224.5 | 274.5 | 324.5 | 374.5 | 424.5 | 474.5 | 524.5 | 574.5 | 624.5 | 674.5 | 724.5 | 774.5 | 824.5 | 874.5 | 924.5 | 974.5 | |
| B | 186.5 | 236.5 | 286.5 | 336.5 | 386.5 | 436.5 | 486.5 | 536.5 | 586.5 | 636.5 | 686.5 | 736.5 | 786.5 | 836.5 | 886.5 | 936.5 | |
| C | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | |
| D | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 | |
| E | 4 | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | |
| J | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | |
Mass by stroke
| stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mass (kg) |
No brakes | 1.9 | 2.1 | 2.3 | 2.5 | 2.8 | 3.0 | 3.2 | 3.4 | 3.7 | 3.9 | 4.1 | 4.3 | 4.6 | 4.8 | 5.0 | 5.2 |
| With brake | 2.2 | 2.4 | 2.6 | 2.8 | 3.1 | 3.3 | 3.5 | 3.7 | 4.0 | 4.2 | 4.4 | 4.6 | 4.9 | 5.1 | 5.3 | 5.5 | |
Main specifications (double slider specifications)
| item | Contents | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (mm) | 12 | 6 | 3 | |
| Horizontal | Payload capacity | Maximum payload (kg) (high output effective) | 24 | 30 | 38 |
| Maximum payload (kg) (high output disabled) | 12 | 18 | 23 | ||
| Speed/Acceleration | Maximum speed (mm/s) | 700 | 450 | 225 | |
| Minimum speed (mm/s) | 15 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 1 | 1 | 1 | ||
| vertical | Payload capacity | Maximum payload (kg) (high output effective) | - | 4 | 14 |
| Maximum payload (kg) (high output disabled) | - | 3 | 8 | ||
| Speed/Acceleration | Maximum speed (mm/s) | - | 340 | 200 | |
| Minimum speed (mm/s) | - | 8 | 4 | ||
| Rated acceleration/deceleration (G) | - | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | - | 0.5 | 0.5 | ||
| Pressing | Maximum thrust when pressing (N) | 112 | 224 | 449 | |
| Maximum pressing speed (mm/s) | 20 | 20 | 20 | ||
| brake | Brake Specifications | Non-excitation electromagnetic brake | |||
| Brake holding force (kgf) | 2.5 | 6 | 16 | ||
| stroke | Minimum nominal stroke (mm) | 200 | 200 | 200 | |
| Minimum effective stroke (mm) | 50 | 50 | 50 | ||
| Maximum nominal stroke (mm) | 800 | 800 | 800 | ||
| Maximum effective stroke (mm) | 650 | 650 | 650 | ||
| Stroke pitch (mm) | 50 | 50 | 50 | ||
(Note) Nominal stroke: Model stroke
Effective stroke: The stroke that can actually be operated
(Note) Lead 12 cannot be installed vertically.
| item | Contents |
|---|---|
| Drive system | Ball screw φ10mm rolled C10 |
| Repeated positioning accuracy | ±0.01mm |
| Lost Motion | Less than 0.1 mm |
| base | Material: Aluminum, white anodized |
| Linear guide | Direct-acting infinite circulation type |
| Static allowable moment | Ma: 546 N・m |
| Mb: 779 N・m | |
| Mc: 205 N・m | |
| Dynamic allowable moment (Note 5) |
Ma: 167 N・m |
| Mb: 199 N・m | |
| Mc: 89.8 N・m | |
| Ambient temperature and humidity | 0 to 40°C, 85% RH or less (no condensation) |
| Protection rating | IP20 |
| Vibration and shock resistance | 4.9m/ s2 |
| Overseas compatible standards | CE mark, RoHS directive |
| Motor Type | Pulse motor |
| Encoder Type | Battery-less absolute |
| Encoder Pulse Number | 8192 pulses/rev |
| deadline | Listed on the website [Delivery Date Inquiry] |
(注5) 基準定格寿命5,000kmの場合です。走行寿命は運転条件、取付け状態によって異なります。
Slider type moment direction

Payload capacity by speed and acceleration (double slider specifications) *High output setting is enabled at the time of shipment. For details, please refer to page 1-23 .
High output setting enabled (power mode) The maximum speed varies depending on the payload. The payload is in kg. Blank spaces indicate that the operation is not possible.
| posture | Horizontal | vertical | ||||
|---|---|---|---|---|---|---|
| speed | Acceleration (G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 24 | 16 | 14 | 12 | ||
| 80 | 24 | 16 | 14 | 12 | ||
| 200 | 24 | 16 | 14 | 12 | ||
| 320 | 24 | 16 | 10 | 8 | ||
| 440 | 20 | 12 | 8 | 6 | ||
| 560 | 12 | 6 | 4 | 2 | ||
| 700 | 5 | 1 | ||||
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 30 | 24 | 22 | 18 | 4 | 4 |
| 40 | 30 | 24 | 22 | 18 | 4 | 4 |
| 100 | 30 | 24 | 22 | 18 | 4 | 4 |
| 160 | 30 | 24 | 22 | 18 | 4 | 4 |
| 220 | 30 | 24 | 20 | 16 | 4 | 4 |
| 280 | 28 | 22 | 18 | 10 | 3 | 3 |
| 340 | 20 | 12 | 10 | 6 | 1 | 1 |
| 400 | 6 | 4 | 1 | |||
| 450 | 1 | |||||
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 38 | 33 | 33 | 33 | 14 | 14 |
| 50 | 38 | 33 | 33 | 33 | 14 | 14 |
| 80 | 38 | 33 | 33 | 28 | 14 | 14 |
| 110 | 38 | 33 | 33 | 28 | 14 | 14 |
| 140 | 38 | 33 | 30 | 26 | 13 | 12 |
| 170 | 36 | 28 | 21 | 20 | 10 | 8 |
| 200 | 25 | 15 | 5 | 4 | 3 | 2 |
| 225 | 3 | |||||
High output setting disabled (energy saving mode) The maximum speed varies depending on the payload. The payload is in kg. Blank spaces indicate that the operation is not possible.
| posture | Horizontal | vertical | |
|---|---|---|---|
| speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.8 | 0.3 |
| 0 | 12 | 8 | |
| 80 | 12 | 8 | |
| 200 | 12 | 8 | |
| 320 | 12 | 8 | |
| 440 | 9 | 3 | |
| 560 | 2 | ||
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 | 加速度(G) | ||
| (mm/s) | 0.3 | 0.8 | 0.3 |
| 0 | 18 | 12 | 3 |
| 40 | 18 | 12 | 3 |
| 100 | 18 | 12 | 3 |
| 160 | 18 | 12 | 3 |
| 220 | 14 | 12 | 2 |
| 280 | 8 | 4 | |
| 340 | 1 | ||
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 | 加速度(G) | ||
| (mm/s) | 0.3 | 0.8 | 0.3 |
| 0 | 23 | 20 | 8 |
| 20 | 23 | 20 | 8 |
| 50 | 23 | 20 | 8 |
| 80 | 23 | 20 | 8 |
| 110 | 18 | 12 | 6 |
| 140 | 12 | 8 | 3 |
| 170 | 8 | 4 | 1 |
Stroke and maximum speed (double slider specification)
(Unit: mm/s)
| Lead (mm) |
Nominal stroke | 200-400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|---|
| Effective Stroke | 50–250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | |
| Connection Controller |
(every 50mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | |
| 12 | High output enabled | 700 | 585 | 515 | 445 | 390 | 345 | 315 | ||
| High output disabled | 560 | 515 | 445 | 390 | 345 | 315 | ||||
| 6 | High output enabled | 450<340> | 415<340> | 350<340> | 295 | 255 | 220 | 190 | 170 | 140 |
| High output disabled | 340<220> | 295<220> | 255<220> | 220 | 190 | 170 | 140 | |||
| 3 | High output enabled | 225<200> | 205<200> | 170 | 145 | 125 | 110 | 95 | 85 | 70 |
| High output disabled | 170 | 145 | 125 | 110 | 95 | 85 | 70 | |||
(Note) Values in < > are for vertical use.
(Note) Nominal stroke: Model stroke
Effective stroke: The stroke that can actually be operated
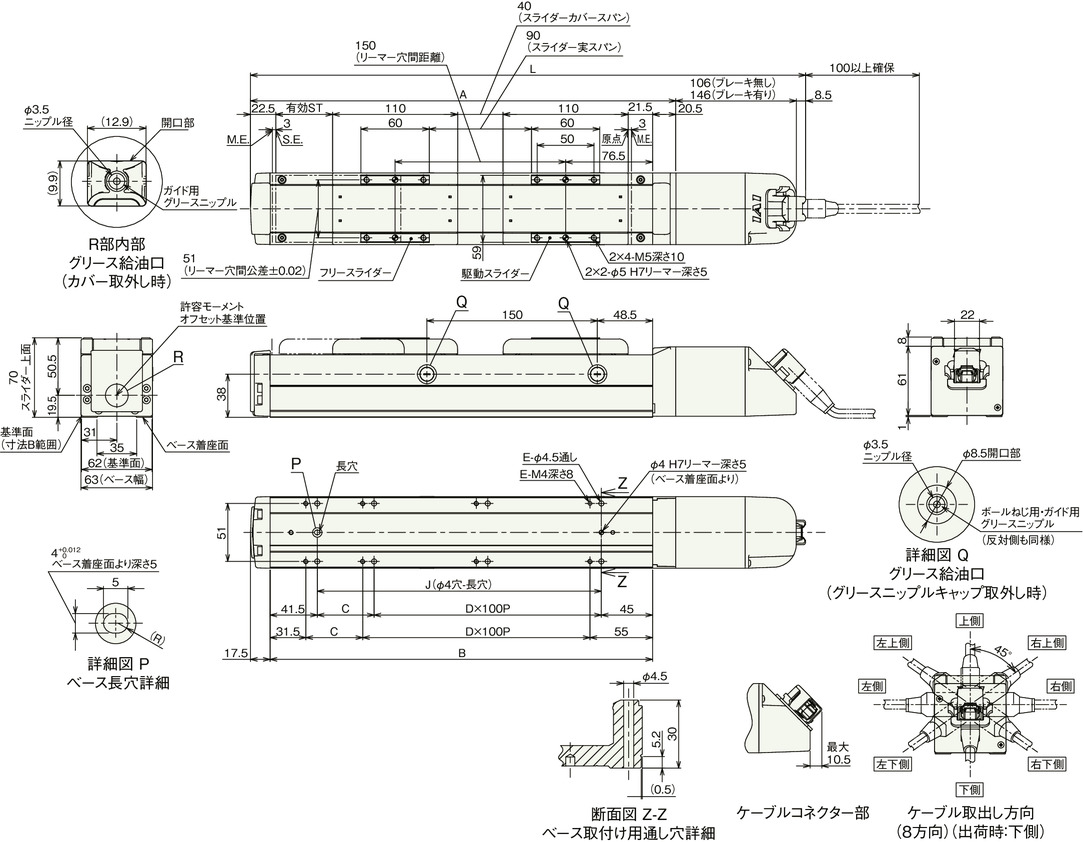
Dimensions (double slider type)
ST: Stroke
ME: Mechanical end
SE: Stroke end
Drawing (double slider specification)
(Note) When performing origin return, the slider moves to the ME, so be careful not to let it interfere with surrounding objects.
(Note) For details on precautions for changing the cable exit direction, refer to page 3-716 .
Stroke dimensions
| Nominal stroke | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Effective Stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | |
| L | No brakes | 489 | 539 | 589 | 639 | 689 | 739 | 789 | 839 | 889 | 939 | 989 | 1039 | 1089 |
| With brake | 529 | 579 | 629 | 679 | 729 | 779 | 829 | 879 | 929 | 979 | 1029 | 1079 | 1129 | |
| A | 374.5 | 424.5 | 474.5 | 524.5 | 574.5 | 624.5 | 674.5 | 724.5 | 774.5 | 824.5 | 874.5 | 924.5 | 974.5 | |
| B | 336.5 | 386.5 | 436.5 | 486.5 | 536.5 | 586.5 | 636.5 | 686.5 | 736.5 | 786.5 | 836.5 | 886.5 | 936.5 | |
| C | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | |
| D | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 | |
| E | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | |
| J | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | |
(Note) Nominal stroke: Model stroke
Effective stroke: The stroke that can actually be operated
Mass by stroke
| Nominal stroke | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Effective Stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | |
| Mass (kg) |
No brakes | 2.93 | 3.23 | 3.43 | 3.63 | 3.83 | 4.13 | 4.33 | 4.53 | 4.73 | 5.03 | 5.23 | 5.43 | 5.63 |
| With brake | 3.23 | 3.53 | 3.73 | 3.93 | 4.13 | 4.43 | 4.63 | 4.83 | 5.03 | 5.33 | 5.53 | 5.73 | 5.93 | |
(Note) Mass is the single slider model plus 0.43 kg of free slider.
Correlation diagram between pressing force and current limit value (double slider specification)
(Note) Same value as the single slider specification.