EC-GRTR14








*Note: Some pictures on this page are still Japanese version and the English version pictures are coming soon.
Main Specifications
| item | Contents | ||
|---|---|---|---|
| GRTR14M | GRTR14L | ||
| Lead (mm) (Note 6) | Equivalent to 2.53 | Equivalent to 1.80 | |
| Grasping Action | Maximum gripping force (N) (total of 3 fingers) | 630 | 950 |
| Gripping speed (mm/s) (per finger) | 20 | 20 | |
| Approach movement | Maximum speed (mm/s) (per finger) | 99 | 71 |
| Minimum speed (mm/s) (per finger) | 2 | 1.2 | |
| Rated acceleration/deceleration (G) (per finger) | 0.3 | 0.3 | |
| Maximum acceleration/deceleration (G) (per finger) | 0.3 | 0.3 | |
| brake | Brake Specifications | - | - |
| Brake holding force (N) | - | - | |
| Strokes (per finger) | 15 | 15 | |
(Note 6) Indicates the distance the finger moves per one rotation of the motor, converted into diameter.
| item | Contents |
|---|---|
| Drive system | Timing belt + hypoid gear + groove cam |
| Repeated positioning accuracy | ±0.02mm |
| Lost Motion | - (Cannot be indicated due to two-point positioning function.) |
| Backlash (one side) | 0.3mm or less |
| Linear guide | Finite Guide |
| Static allowable moment (per finger) |
Ma: 36.5 N・m |
| Mb: 36.5 N・m | |
| Mc: 49.6 N・m | |
| Vertical allowable load (Note 7) (per finger) |
763N |
| Ambient temperature and humidity | 0 to 40°C, 85% RH or less (no condensation) |
| Protection rating | IP20 |
| Vibration and shock resistance | 4.9m/ s2 |
| Overseas compatible standards | CE mark, RoHS directive |
| Motor Type | Pulse motor (□42) (power capacity: max. 4.2A) |
| Encoder Type | Incremental/Battery-less Absolute |
| Encoder Pulse Number | 800 pulses/rev |
| deadline | Listed on the website [Delivery Date Inquiry] |
(Note 7) If the product is used under a load exceeding the above values, it may shorten its lifespan or cause damage.
Slide type moment direction

Adaptive Controller
(Note) The EC series has a built-in controller. For details on the built-in controller, see page
International Standards


Selection considerations
| (1) The maximum opening and closing speed in the "Main Specification" indicates the operating speed per finger. The relative operating speed is twice the value. (2) The maximum gripping force in the "Main Specification" is the total value of the gripping force of the three fingers when the gripping point distance and overhang distance are 0. For the actual workpiece mass that can be transported, please refer to the "Confirming the gripping point distance" and "Gripping force" graphs. (3) Always use the pressing operation when gripping a workpiece. (4) The self-locking mechanism maintains the gripping force even when the power is cut off. (However, it does not guarantee that the workpiece will not be dropped.) When removing a workpiece that is being gripped when the power is cut off, turn the opening and closing screw on the side or remove the finger attachment to remove the workpiece. (5) Use with a duty ratio of 90% or less. For details, please refer to page . (6) The power saving setting of the controller can only be disabled. |
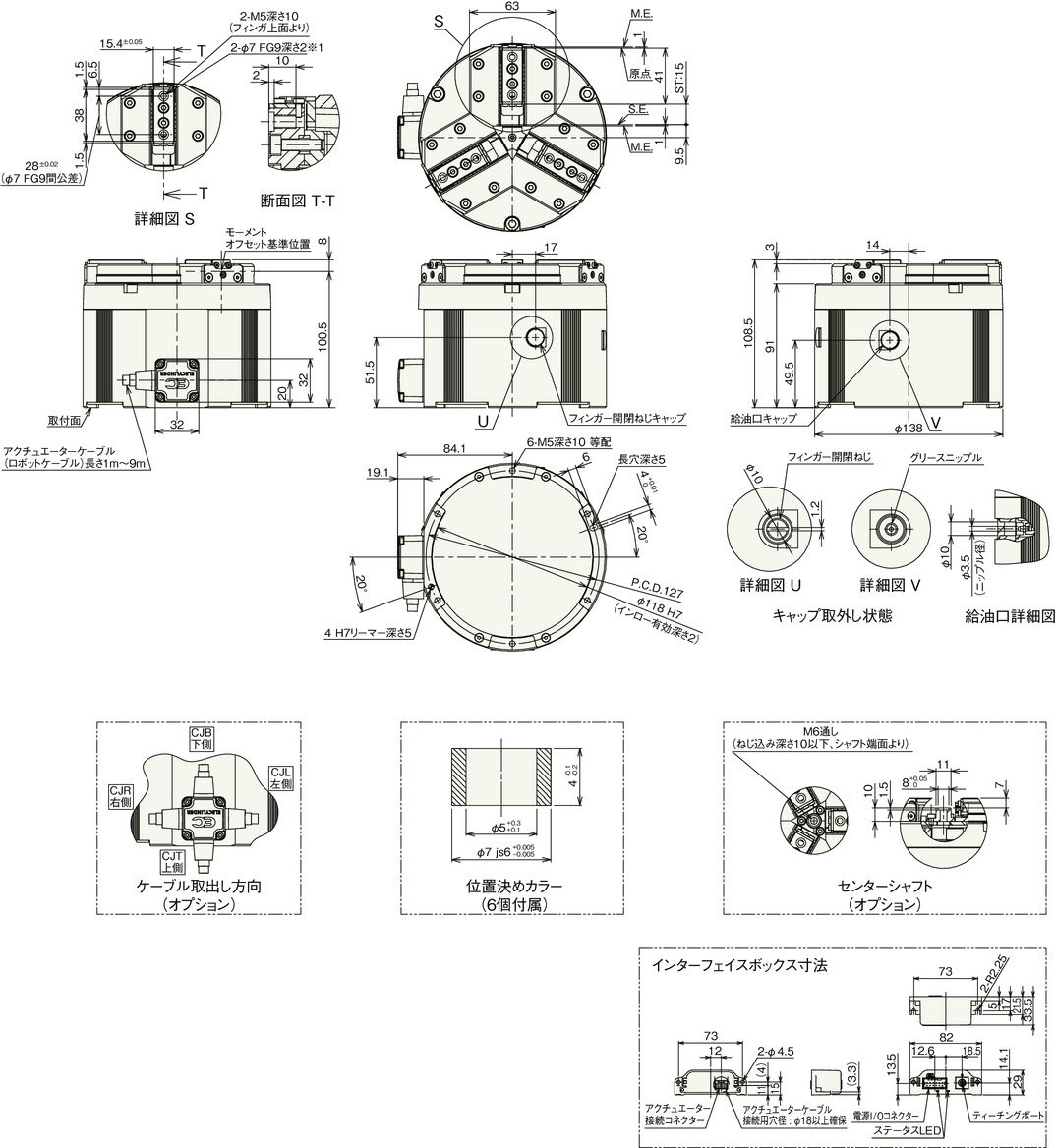
Dimensions
ME: Mechanical end
SE: Stroke end
*1 Six positioning collars are included for mounting the finger attachment.
(Note) The standard setting is that the open side is the home position. If you wish to set the home position to the closed side, please specify the option (model: NM).
Mass by stroke
| item | Contents |
|---|---|
| mass | 2.42kg |
(Note) This value applies when an actuator cable length of 1 m is selected.
Check gripping distance
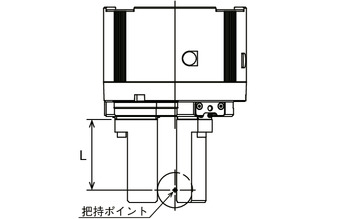
The distance (L) from the finger (claw) mounting surface to the gripping point should be 100 mm or less for standard specifications, and 67 mm or less for high gripping force specifications.
(Note) Even if the gripping point distance is within the limit range, make it as small and light as possible. If the finger length or mass is large, the inertial force and bending moment when opening and closing may cause a decrease in performance or adversely affect the guide section.
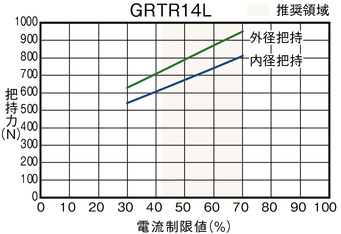
Grip Force
■Correlation diagram between gripping force and current limit value
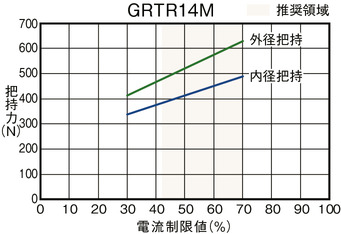
(Note) This is the total value for three fingers when the gripping point distance (L) is 0.
(Note) These are approximate values. There is a variation of about 0 to 40%. The possibility of variation is particularly high when the current limit value is set outside the recommended range (the colored range of the graph).
(Note) When gripping (pushing), the speed is fixed at 20 mm/s.
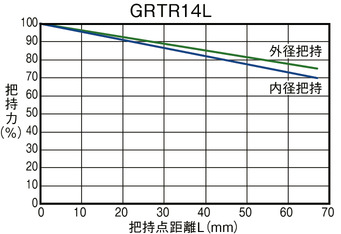
■ Guideline for gripping point distance and gripping force
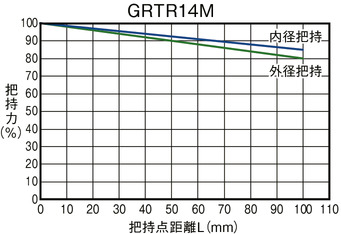
(Note) This indicates the gripping force at the extension position when the maximum gripping force is 100%. The results may vary depending on the rigidity of the finger attachment used.